
پروژه متلب+(51308)
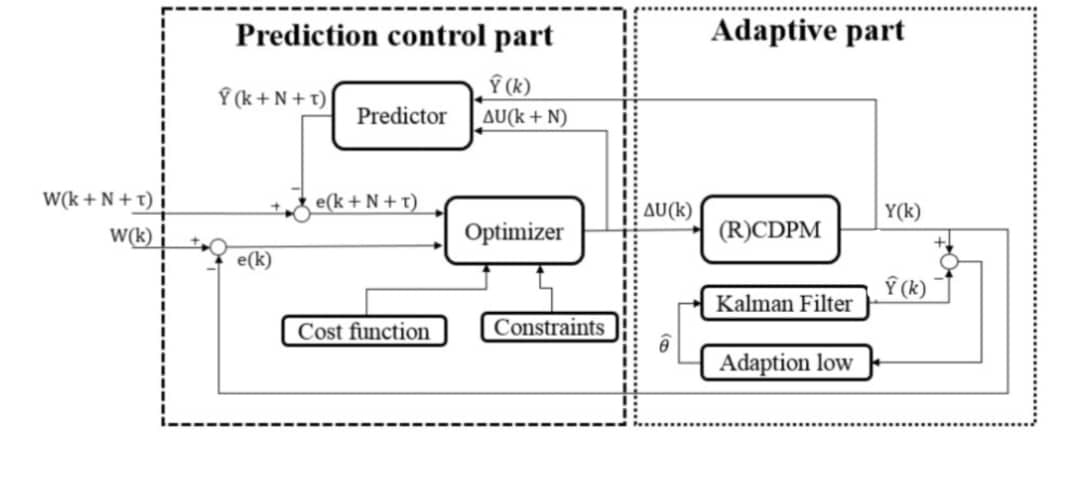
سلام خسته نباشید؟ یه سوال داشتم از حضورتون، شما پروژه ربات کابلی هم انجام میدید؟ طراحی کنترلر برای ربات کابلی؟ طراحی کنترلر پیش بین تعمیم یافته تطبیقی برای ربات کابلی Adaptive generalize predictive control for cable driven robot شماتیکی که باید انجام بشه در کد متلب یا سیمولینک که البته اگر سیمولینک باشه بهتره رو براتون ارسال کردم. سیسیتم مورد بررسی ربات کابلی با هشت کابل است که ورودی جریان موتورهای کابلها و خروجی پوزیشن و سرعت اندافکتور است باید اول با کمک شناسایی سیستم یا فیلتر کالمن مقادیر سیستم یا پارامترهای مدل تشخیص داده بشه و از این پارامترهای تخمین زده شده در طراحی کنترلر پیش بین تعمیم یافته استفاده بشه. در قسمت constraint باید محدودیت مثبت بودن تنش کابلها اعمال شود. هدف این کنترلر ردیابی سیگنال موقعیت ورودی میباشد. برای مدل کردن سیستم کابلی از مقاله زیر میشه استفاده کرد. برای مدل کردن سیستم زمانش ماکزیمم سه هفته فرصت دارم. 3492*

امتیاز : 9.2 از 10
{kind=link}
- اطلاعات پروژه
- 4230کد پروژه
-
کمک آموزشی
دسته بندی - 04 اسفند 1401تاریخ ثبت
- 21 روزمهلت اجرا
- 100,000 تومانحداقل بودجه
- 300,000 تومانحداکثر بودجه
- 5 درصد ضمانت اجرا
- آماده دریافت پیشنهادها وضعیت
تایم لاین پروژه
درخواست پشتیبانی-
در انتظار پرداخت
پرداخت تعرفه ثبت پروژه های غیر رایگان
-
در حال بررسی
برسی و تایید پروژه از طرف مدیرت سایت
-
آماده دریافت پیشنهادها
تایید پروژه و نمایش برای مجریان
-
در انتظار پرداخت هزینه پروژه
پرداخت هزینه اجرای پروژه توسط کارفرما
-
در انتظار پرداخت ضمانت اجرا
پرداخت مبلغ ضمانت اجرا توسط مجری
-
در حال انجام
پروژه شما درحال انجام می باشد
-
انجام شد
اتمام اجرای پروژه
لیست پیشنهادها
هیچ پیشنهادی ارسال نشده است
در حال بارگذاری...